









Lane Identification Pro
Perihal Lane Identification Pro
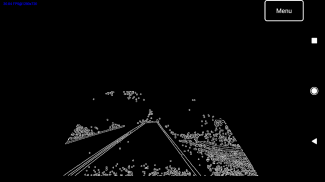
Lane Identification Pro demonstrates how you can repurpose your old phone/tablet as a driving assist tool. Interested in self driving cars and autonomous driving systems? This app will give you a sneak peak on how lane identification on some of these autonomous driving systems work. The app runs best on the latest generation of phones and tablets but is designed to optimize performance on older hardware as well.
Lane Identification Pro is smart. It monitors the performance of its algorithms on your device and tweaks their settings as needed to give you the best results. The app will automatically calibrate the performance settings to match your device's capabilities and adjust the Region of Interest and Lane Departure Warning settings based on where lanes are being identified in the camera view. Note these are not one time calibrations. The auto calibration algorithms constantly run in the background to give you the best results at all times.
If you are still experiencing performance issues or want to play with some of the settings, please refer to the "Troubleshooting Tips" and "Help" sections in the app. You will be able to switch your view between the original image, filtered image for driving lane detection or the output of the canny edge detection algorithm used to identify lane lines. You can also enable/disable lane stabilization and configure the "region of interest" which represents the area of the screen we expect the driving lanes to be present in. The app can also detect when you are drifting out of your lane and alert you with a Lane Departure Warning (LDW).
Interested in more advanced settings? We give you full control of the parameters that go into the driving lane identification process.
* Enable/disable automatic detection of white level threshold used to tease out the lane lines or specify your custom value.
* Specify whether you want to apply Gaussian blur to the result (including the kernel size)
* Configure the low and high thresholds for Canny edge detection including the aperture size and whether to use a L1/L2 gradient.
* Configure the threshold for the probabilistic Hough Transform used to detect lane lines along with the min line length and max line gap
* Configure parameters for lane stabilization and ignoring bad detection.
* Configure parameters for Lane Departure Warnings (LDW).
More features coming soon!
Lane Pengenalan Pro menunjukkan bagaimana anda boleh dibuat semula telefon / tablet lama anda sebagai memandu membantu alat. Berminat dalam kereta memandu sendiri dan sistem memandu autonomi? Aplikasi ini akan memberikan anda satu puncak menyelinap mengenai cara pengenalan lorong di sesetengah autonomi kerja sistem memandu. Aplikasi ini berjalan terbaik pada generasi terbaru telefon dan tablet tetapi direka untuk mengoptimumkan prestasi pada perkakasan lebih tua juga.
Lane Pengenalan Pro merupakan pilihan yang bijak. Ia memantau prestasi algoritma pada peranti anda dan tweak tetapan mereka seperti yang diperlukan untuk memberikan anda hasil yang terbaik. Aplikasi secara automatik akan mengubah suai tetapan prestasi untuk dipadankan dengan keupayaan peranti anda dan menyesuaikan Wilayah tetapan Amaran Berlepas faedah dan Lane berdasarkan di mana lorong sedang dikenal pasti memandangkan kamera. Ambil perhatian ini bukan satu keselarasan masa. Algoritma penentukuran auto sentiasa berjalan di latar belakang untuk memberikan anda hasil yang terbaik pada setiap masa.
Jika anda masih mengalami isu-isu prestasi atau ingin bermain dengan beberapa tetapan, sila rujuk kepada "Tip" dan "Bantuan" bahagian dalam app. Anda akan dapat untuk menukar paparan anda antara imej asal, imej yang ditapis untuk memandu pengesanan lorong atau output canny algoritma pengesanan kelebihan yang digunakan untuk mengenal pasti garisan lorong. Anda juga boleh mendayakan penstabilan lorong / melumpuhkan dan mengkonfigurasi "kawasan kepentingan" yang mewakili kawasan skrin kami menjangkakan lorong memandu untuk hadir di. Aplikasi ini juga boleh mengesan apabila anda sedang hanyut daripada lorong anda dan memberi isyarat kepada anda dengan Amaran Lane Departure (LDW).
Berminat dalam persekitaran yang lebih maju? Kami memberi anda kawalan penuh parameter yang masuk ke dalam proses pengenalan memandu lorong.
* Membolehkan / melumpuhkan pengesanan automatik putih ambang tahap digunakan untuk dapati daripada garisan lorong atau menentukan nilai adat anda.
* Tentukan sama ada anda ingin memohon kabur Gaussian untuk keputusan (termasuk saiz kernel)
* Konfigurasi ambang rendah dan tinggi untuk pengesanan pinggir Canny termasuk saiz aperture dan sama ada untuk menggunakan kecerunan L1 / L2.
* Konfigurasi ambang untuk Hough kebarangkalian Transform digunakan untuk mengesan garisan lorong bersama-sama dengan panjang min talian dan jurang talian max
* Parameter Configure untuk penstabilan lorong dan mengabaikan pengesanan buruk.
* Parameter Konfigurasi bagi Amaran Lane Departure (LDW).
Lagi ciri-ciri yang akan datang tidak lama lagi!
Lane Identification Pro - Maklumat APK
Versi APK: 2.30Pakej: com.vembarllc.laneidentificationproVersi Terkini Lane Identification Pro













Aplikasi dalam kategori sama








